{kind=link}
A new touchstone for virtual reality
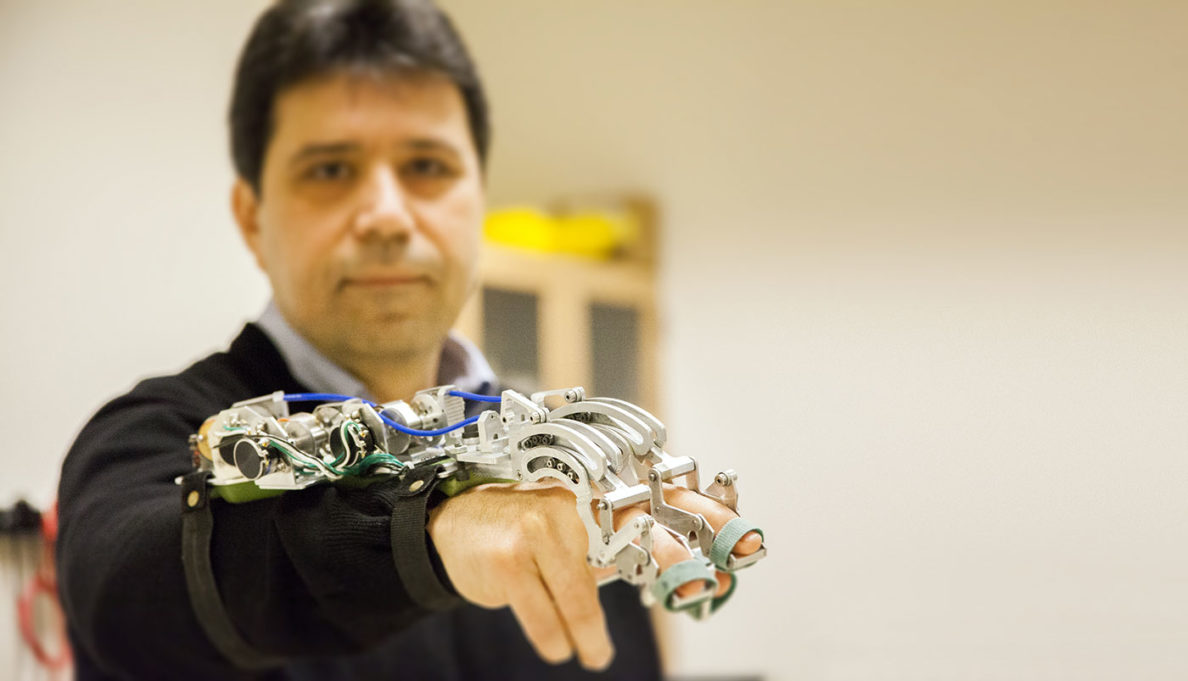
On its own, the gleaming silver skeletal hand looks like a disembodied limb from The Terminator. Strap it on a human and it becomes a glove to grasp things within virtual, computer-generated worlds.
Hakan Gurocak, the mechanical engineering professor at Washington State University Vancouver who designed the glove with his former graduate student Randy Bullion, says the haptic interface can be used in conjunction with virtual reality headsets and position sensors to add a new sense of touch to the experience of being in a digital environment.
More than just immersive computer games or movies, virtual reality and the haptic glove could, for example, help physicians perform better diagnoses during robot-assisted surgery. Using information from robotic arms, the surgeon can push on tissue and determine if it’s diseased or healthy, says Gurocak ’93 PhD, who is also founding director of the WSU Vancouver School of Engineering and Computer Science and head of the robotics and automation laboratory.
Manufacturing companies could also virtually prototype products and test them, saving money on multiple iterations because they wouldn’t have to make the physical items.
The haptic interface comes at a good time. Virtual reality is poised to take off, with Oculus Rift, Samsung Gear, and other consumer VR devices on the market this year.
But the glove had a problem.
It works using actuators, small electronic brakes that apply resistance to the human hand to simulate holding or touching an object. The small size of the actuators is possible because they use magnetorheological (MR) fluid, with iron particles suspended in an oil. When activated magnetically, a change in viscosity causes the brakes to apply forces on fingers. The small MR-brakes were also developed in Gurocak’s lab.
The problem involved “memory.” MR fluid doesn’t fully change to its prior state when deactivated, essentially because of stored magnetic memory in the brake. In other words, if you are holding a tennis ball in a virtual reality simulation and release the ball, it still sort of feels like you’re holding it. The problem, hysteresis, is well-known.
“It feels like the ball is stuck to your hand and you can’t get rid of it,” says Gurocak.
So Gurocak and his graduate students set to work on the issue, and eventually found that tiny, inexpensive sensors placed in the MR-brake could cancel the hysteresis and return the resistance to the proper level.
“If we detect that there’s magnetic field remaining, we are able to polarize it, just enough to reverse it.”
Gurocak received a U.S. patent for the method last July. He received another patent the following month for a linear MR-brake, in which the brake moves along a rod and can resist or stop at any point.
His MR actuator innovations have commercial applications beyond virtual reality. The automotive, aerospace, robotics, prosthetics, retail, computer game, and rehabilitation industries could use the compact and powerful devices.
Even after eliminating the hysteresis, Gurocak says haptics research is still in its infancy. “There are still huge challenges in making them lightweight and inexpensive. But I can think of many applications. Imagine if you could hold a shoe while online shopping.”
Gurocak says he’s still working on improving actuators for other wearables beyond gloves. He notes his former graduate students who helped with the inventions could contribute to the field, as they have moved on to medical technology and robotics research, as well as opening their own businesses.
On the web
More about Gurocak’s patents and laboratory (WSU Vancouver magazine, Northwest Crimson & Gray, Spring 2016 – PDF)